









3 серьезных проблемы автопилотов, которые не выглядят решаемыми
Смертельная авария Tesla с Model S - так себе повод, но, как в анекдоте о драке на свадьбе, «надо же кому-то начинать». Обсуждений много, трактовок происходящего на рынке и причин аварий миллион.
«Да как же он фуру-то не увидел!» и вот этого всего. Не увидел, не справился с ситуацией, да. И автопилот еще долго не сможет справиться с тем, что щелкают белковые выпускники автошкол.
Попробую описать 3 практических сложности, с которыми сталкиваются автопилоты сейчас и которые не выглядят решаемыми в ближайшие годы. Так что когда McKinsey говорит, что к 2030 году в лучшем случае 15% новых автомобилей будут самоуправляемыми, верьте им.
И если что-то пойдет не так, то к 2040 году не более 5% автомобилей можно будет назвать автопилотируемыми.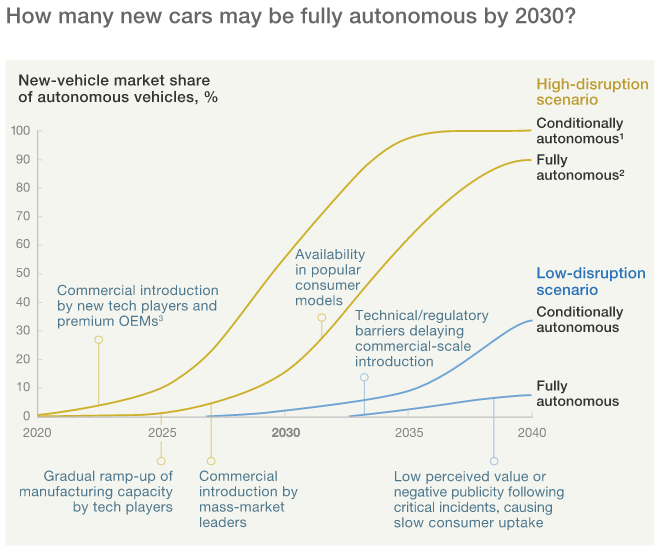
Почему?
Первая проблема, датчики
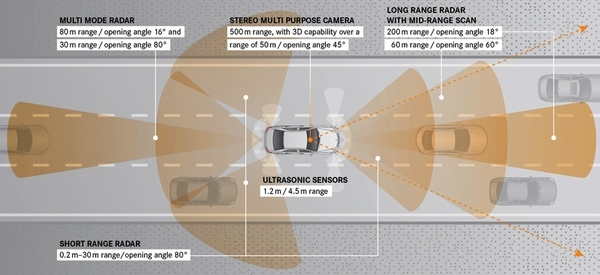
Главный тормоз развития автопилотов - не алгоритмы. А отвратительное понимание машиной окружающего пространства. Информации с современных датчиков категорически недостаточно и совершенствование механизма принятия решений (нейросети и так далее) мало что меняет. Сканирующие лидары (черные ведерки, что стоят на большинстве прототипов, включая Google Car) запредельно дороги для серийных автомобилей и не дают необходимой для уверенного движения полноты информации.
Простая иллюстрация: AI побеждает пилота на симуляторе воздушного боя в той ситуации, когда у машины есть полная информация о происходящем. Компьютер проедет вас в любом симуляторе. На дороге этого не произойдет.
И компьютерные полигоны для автономного транспорта , которые обучаются на синтетической информации, ничего серьезно не изменят.
Что делать?
Есть мнение, что при существующих датчиках (камеры, радары, лидары и т.п.) полностью решить проблему самоуправления вообще нельзя. Так что совершенствовать возможности современных датчиков, придумывать новые для корректной «оцифровки» пространства в динамике.
Чем-то похоже на вопрос с аккумуляторами. Пока емкость аккумуляторов не получится повысить в разы, а лучше на порядок, носимая электроника, электрокары и многие другие топчутся на месте.
Вторая проблема, неуниверсальность

Все знакомы с Законом Парето, так вот в автопилотах он тоже выполняется. 80% дорожных ситуаций машины понимают, оставшиеся 20% все портят.
Это не значит, что автопилоты могут ехать по 80% дорог в мире. Это означает, что в рамках любой произвольно взятой поездки 80% ситуаций не вызовут проблем, 20% - вызовут. Опасная пропорция.
Посмотрите на то, что работает. Эти задачи и окажутся самыми простыми. Автобанный автопилот, автопарковка, заезд в гараж - не без помарок, но функционирует.
Разработчикам осталось самое неприятное: проезд пересечений, перестроения в оживленном потоке и еще пара десятков похожих сценариев. С некоторыми кейсами не очень понятно, что вообще делать. Например, автомобилю сложно заранее понять, проедет ли он между двумя близко расположенными препятствиями. И пока невозможно понять свой динамический корридор (то есть границы пространства, которые автомобиль занимает в динамике), а без этого невозможно корректно просчитать дорожную ситуацию.
Существующие автопилоты настолько не универсальны, что требуют каждый дорожный сценарий описывать отдельно. Читали комментарий Mobileye к пресловутой аварии? Официальная позиция такова: система предотвращений столкновений не понимает приезда автомобиля со встречной полосы, году в 2018 начнет.
Что делать?
Клиенту, как минимум, не вестись на эффектные демонстрации на автострадах - это самые простые задачи. Что до игроков, то они пока не понимают, какой путь верен. Отсюда нейросети, ручная разметка сценариев (пишут, что в Mobileye этим занимаются 600 человек, а скоро будет более 1000), виртуальные полигоны и все такое.
Проблема третья, рыночная

Автопилоту или другой фиче мало быть функциональной, нужно стать дешевой. Автомобильной навигации больше двадцати лет. Но при цене системы в пару-тройку тысяч долларов она до сих пор ставится менее чем на 20% всех новых автомобилей. Самоуправляемый функционал еще дороже.
70 тысяч баксов за лидар Velodyne или 30 тысяч за несколько лидаров Sick - перебор, это понятно. Если ориентироваться на серийные автомобили, advanced driver assistance systems, сокращенно ADAS, (которые еще не автопилоты) добавляют к цене 7-12 тысяч долларов. Нормально? Не-а.
Исследование Boston Consulting Group говорит, что потратить на автопилот более 5 тысяч долларов готовы только 17% покупателей (американских покупателей, замечу). То есть чтобы завоевать хотя бы 15 процентов рынка, системе автопилотирования нужно стать грубо говоря на порядок умнее и вдвое дешевле, чем сейчас. Это не выглядит близкой перспективой.
Так что помощников с элементами автопилотирования (автопарковка, автодвижение в пробке, движение по трассе с разметкой или даже конвойные режимы) в ближайшие пару-тройку лет будет все больше. Автопроизводители удешевят и масштабируют эти функции, не проблема. Toyota предлагает свой простейший Safety Sense всего за 500-1000 долларов, это немного.
А в сложных ситуациях (те самые 20 процентов поездки) управление на долгие годы останется на человеке. Почему? См. пункт 1 - машина не может адекватно оценить происходящее и в ближайшее время не научится.
Так что делать?
Привыкать к аббревиатуре ADAS, которая в ближайшие пять лет станет такой же привычной как стали ABS и ESP. После 2020 года стоит ждать активного госрегулирования в этой области, системы активной помощи станут обязательными в Европе и США.
И понимать, что полноценного автопилота пока на рынке нет, и вообще у них (пока) неустранимые проблемы.
Повідомити про помилку - Виділіть орфографічну помилку мишею і натисніть Ctrl + Enter

Сподобався матеріал? Сміливо поділися
ним в соцмережах через ці кнопки






















